Our paper entitled “Reactive Dexterous Ungrasping with Tactile Sensing” is accepted by CASE 2023.
Current robotic manipulation systems put much effort into how to grasp objects firmly, while the complementary processing “ungrasping” of placing objects safely, does not receive enough attention yet.
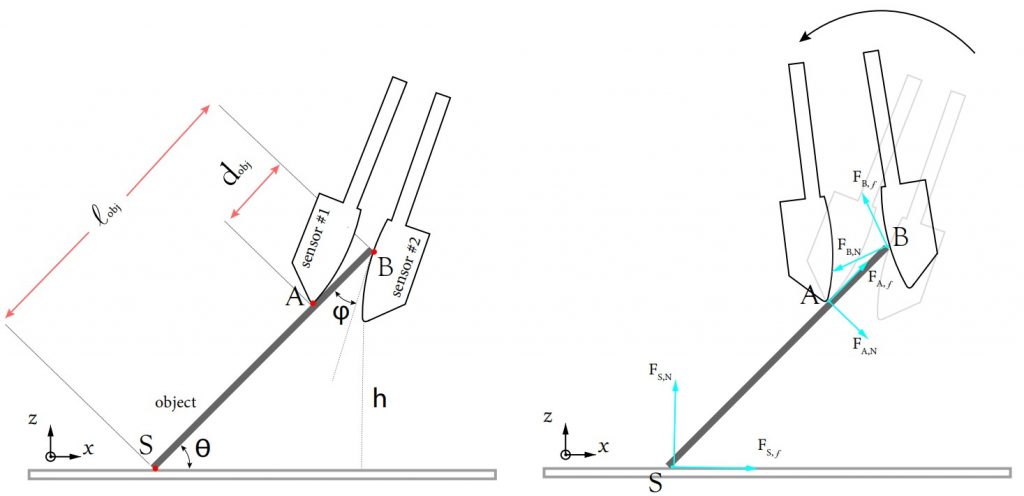
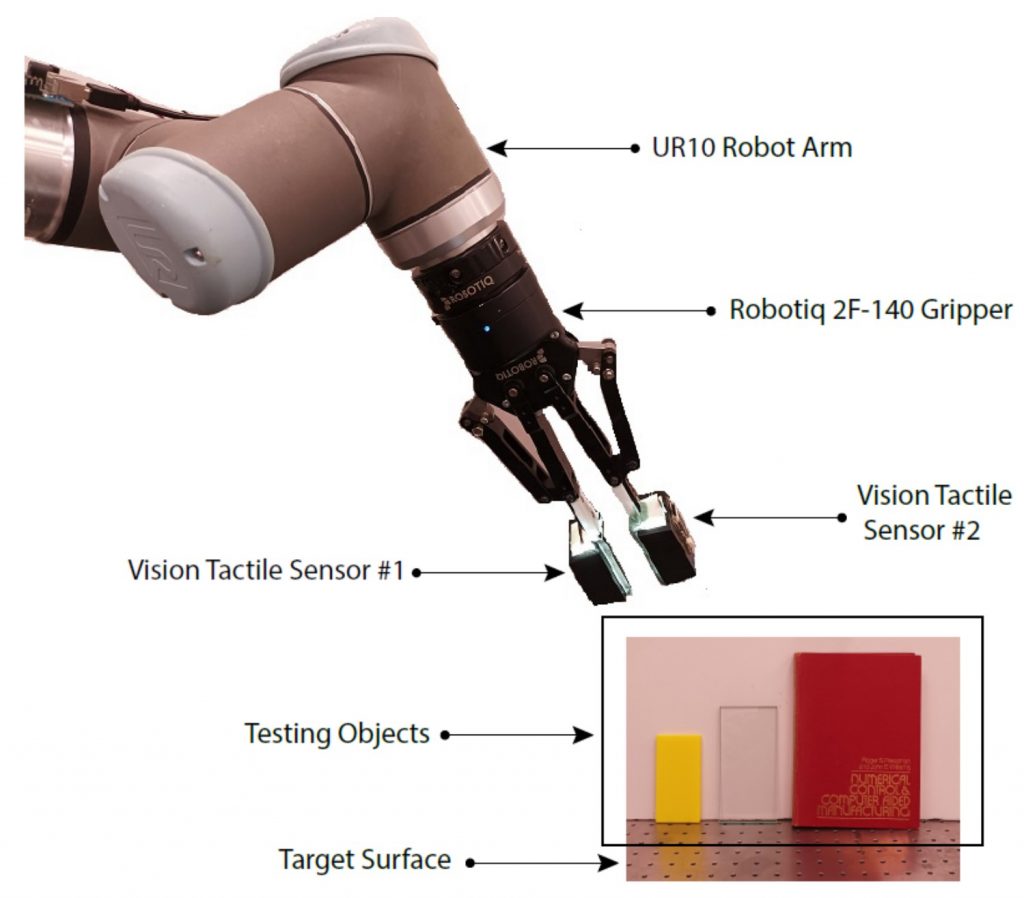
In this paper, we present a close-loop method for safe and robust robotic placement for objects with thin thicknesses. The system consists of a perception module and a gripper motion optimizer. The perception system utilizes vision-based tactile sensors to collect the real-time system states. The sensing information is passed into a MPC optimizer to generate the best gripper motion to approach the target system state.
The method is tested through various kinds of thin objects with limited object information. The results demonstrate the ability to estimate the instant system states and hence reject or re-plan to recover from external disturbances.