Our paper entitled “Unbounded Cooperative Pursuit Using a Linearized Safe-Reachable Set” is accepted by LCSS/ACC 2024.
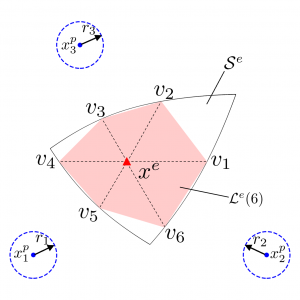
This letter proposes an online cooperative pursuit strategy for multiple pursuers within an unbounded domain. One of the popular cooperative pursuit strategies is Voronoi-based pursuit, which is designed by minimizing the area of the evader’s Voronoi cell. However, this pursuit strategy only works for bounded domains as the Voronoi cell is well-defined in a bounded environment. Instead, our strategy is built upon the minimization of the farthest squared distance between the evader and its safe-reachable set (SRS), which formulates the cooperative pursuit as an online concave optimization problem. To overcome the computational burden arising from solving the concave optimization problem, we linearize the SRS as a convex polygon by sampling vertices on the boundary of SRS, which transforms the concave optimization problem into a more tractable one. Moreover, we show that if the vertex number is large enough, our approach can guarantee a capture of the evader in finite time for cases with non-zero capture radii. Simulation results demonstrate the efficacy and efficiency of our approach.