Our paper entitled “Learning Whole-Body Loco-Manipulation for Omni-Directional Task Space Pose Tracking with Wheeled-Quadrupedal-Manipulator” accepted by RA-L 2024
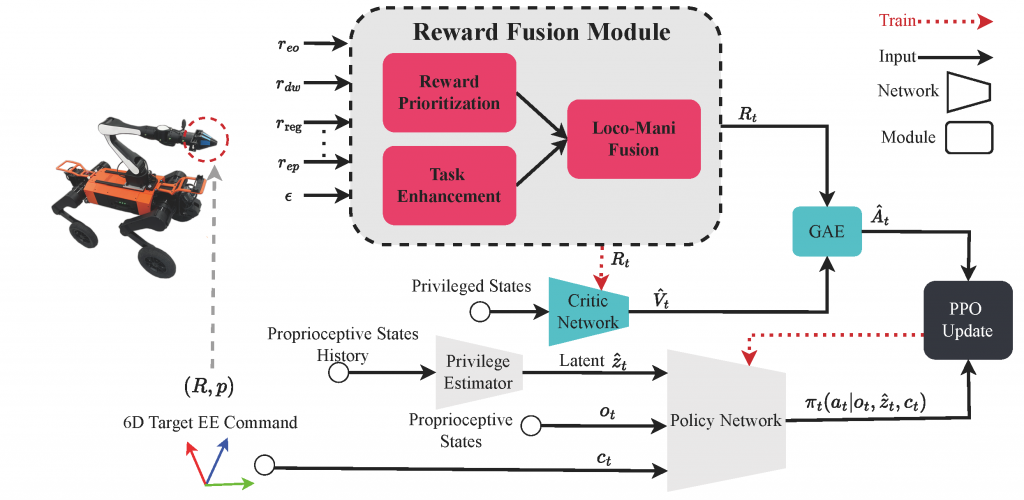
In this paper, we study the whole-body loco-manipulation problem using a Wheeled Quadrupedal Manipulator (WQM) platform. We focus on coordinating the floating base and robotic arm to achieve direct six-dimensional (6D) end-effector pose tracking in task space. This problem requires inherent balance among redundant degrees of freedom in whole-body motion. To address this challenge, we develop a novel Reward Fusion Module (RFM) that systematically integrates various reward terms in a nonlinear manner, accommodating the multi-stage and hierarchical nature of loco-manipulation. By combining our RFM with a teacher-student reinforcement learning paradigm, we present a complete scheme for 6D end-effector pose tracking. Extensive experiments, both in simulation and on hardware, demonstrate smooth and precise tracking performance, achieving state-of-the-art position errors below 5 cm and rotation errors under 0.1 rad.