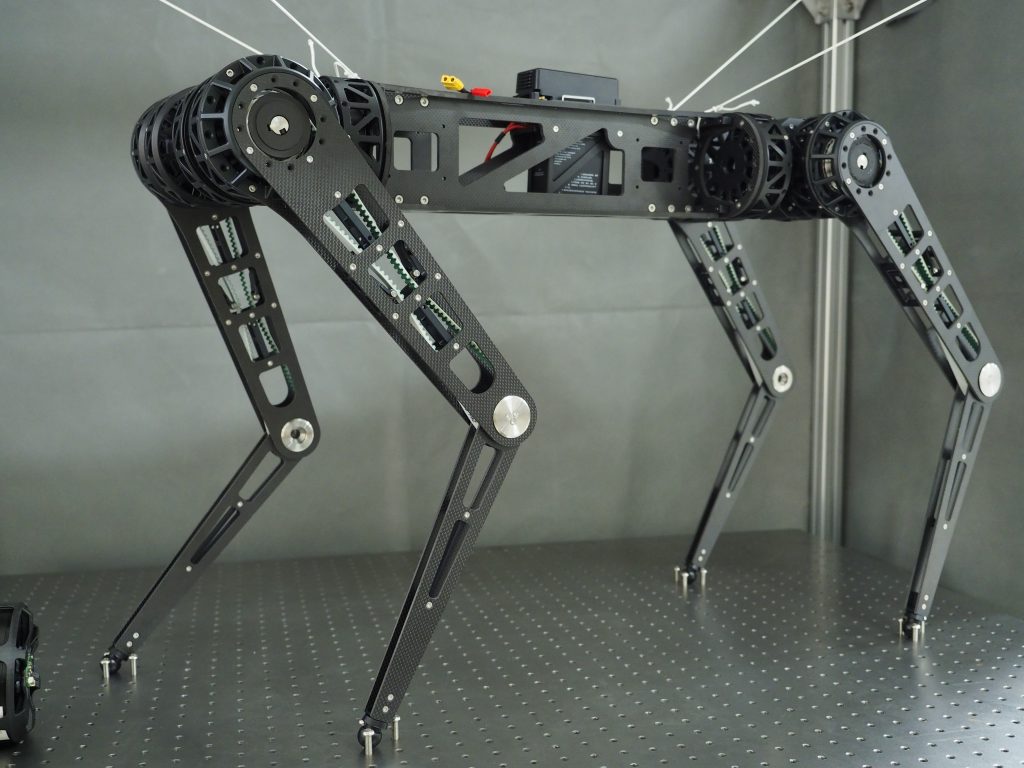
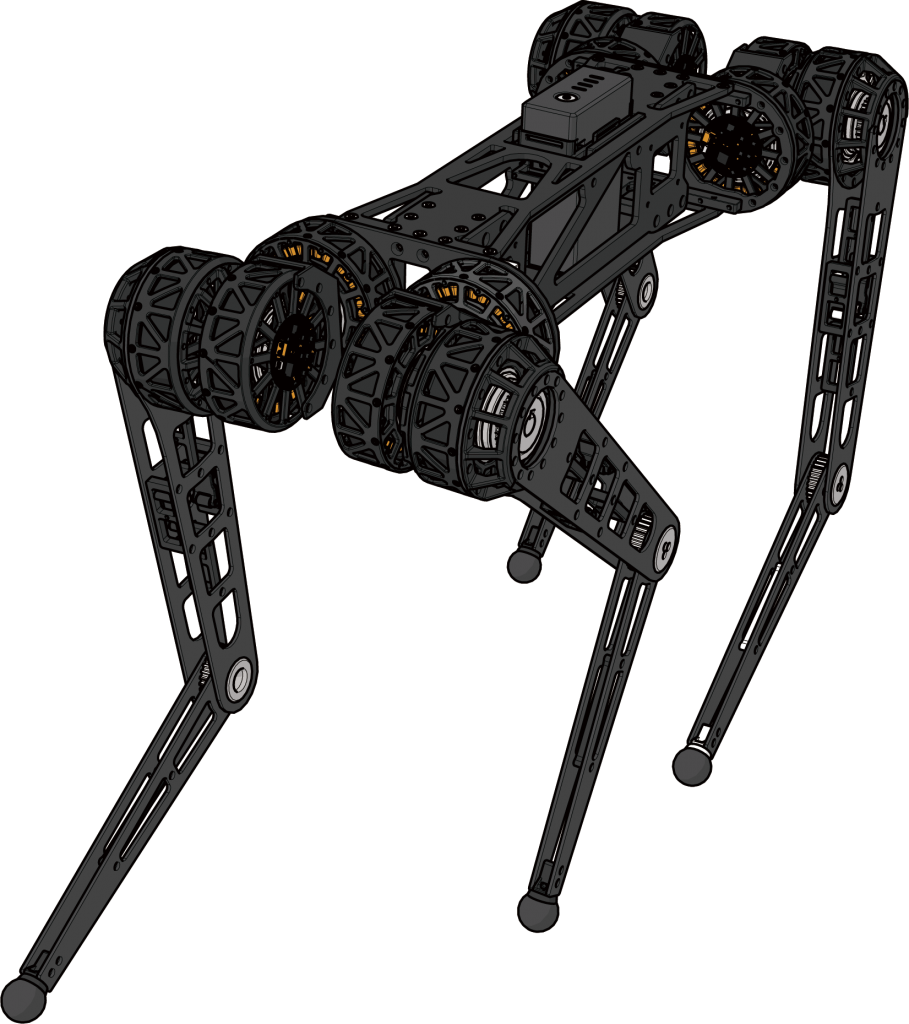
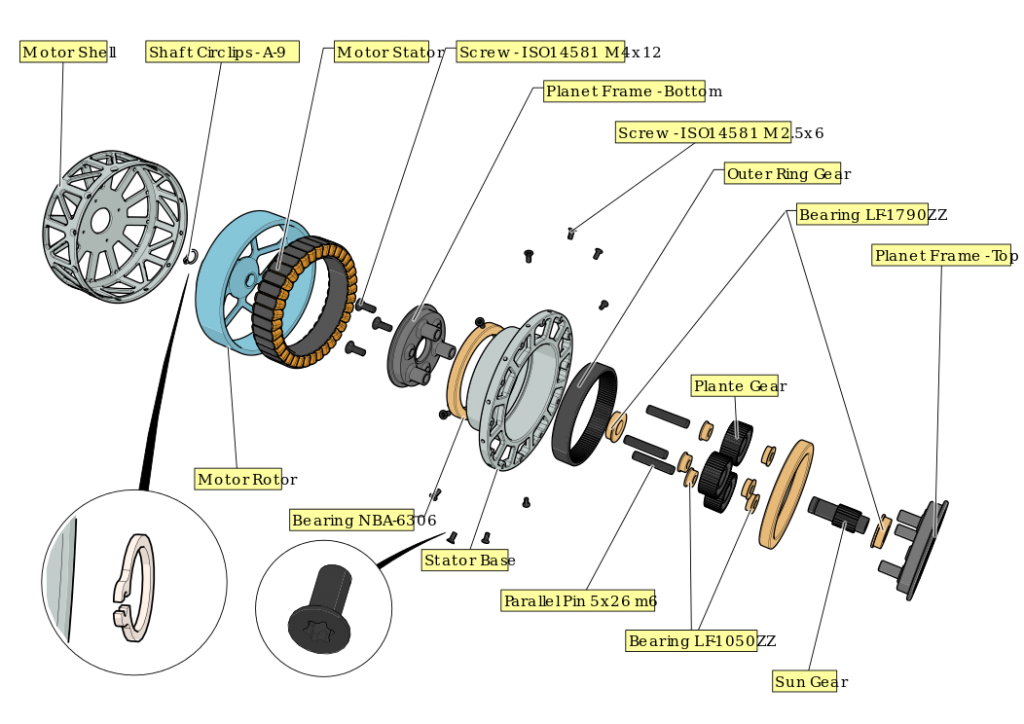
Take a look at our in-house built quadruped robot with customized motor and body designs. It is designed and built mostly by Shenggao Li (an undergraduate student in our lab). It is expected to have a high power density and is able to accomplish very agile motions. It will be a great experimental platform for validating our advanced control and learning algorithms. Stay tuned!